SynDRA
Synthetic Dataset for Railway Applications
SynDRA
SynDRA is a synthetic dataset for railway applications. For now, SynDRA includes 80 sequences captured in 4 different environments and changing weather and light conditions. The sensors for now are limited to a stereo RGB camera setup, while the ground truth labels only include semantic segmentation. However, we will soon extend the dataset to additional environments, sensors (LiDAR and Radar), and ground truth labels (object detection, depth masks). Our custom simulation framework is flexible enough to accommodate any needs, so feel free to reach out!
You can download the entire dataset, which includes 80 sequences from stereo camera systems with related semantic annotations, or you can download individual scenarios, each containing 10 different sequences (reference to license, notice and terms of use are in the main folder of the dataset). MEGA Download Links for SynDRA v0, as presented in the WACV2025 paper:
- SynDRA: The whole dataset, ~1.8TB of data.
- Utils: Sensor Specs, and Python Scripts: from .bin files to png.
By downloading this dataset, you agree to the License, Terms of Use, and Third-Party Content Notice.
SynDRA was accepted for publication at the Winter Conference of Computer Vision Applications (WACV 2025).
If you use SynDRA-BBox in your research, please cite the following paper:
@inproceedings{d2025syndra,
title={SynDRA: Synthetic Dataset for Railway Applications},
author={D’Amico, Gianluca and Nesti, Federico and Rossolini, Giulio and Marinoni, Mauro and Sabina, Salvatore and Buttazzo, Giorgio},
booktitle={2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)},
pages={3437--3446},
year={2025},
organization={IEEE}}
A new version of the dataset with bug fixes (such as corrected lighting and semantic labels) will be available soon. Please report any errors or bugs you encounter. You can contact us at gianluca.damico@santannapisa.it. Additionally, a benchmark table showcasing the results of semantic segmentation models on our dataset will be coming soon.
The Dataset
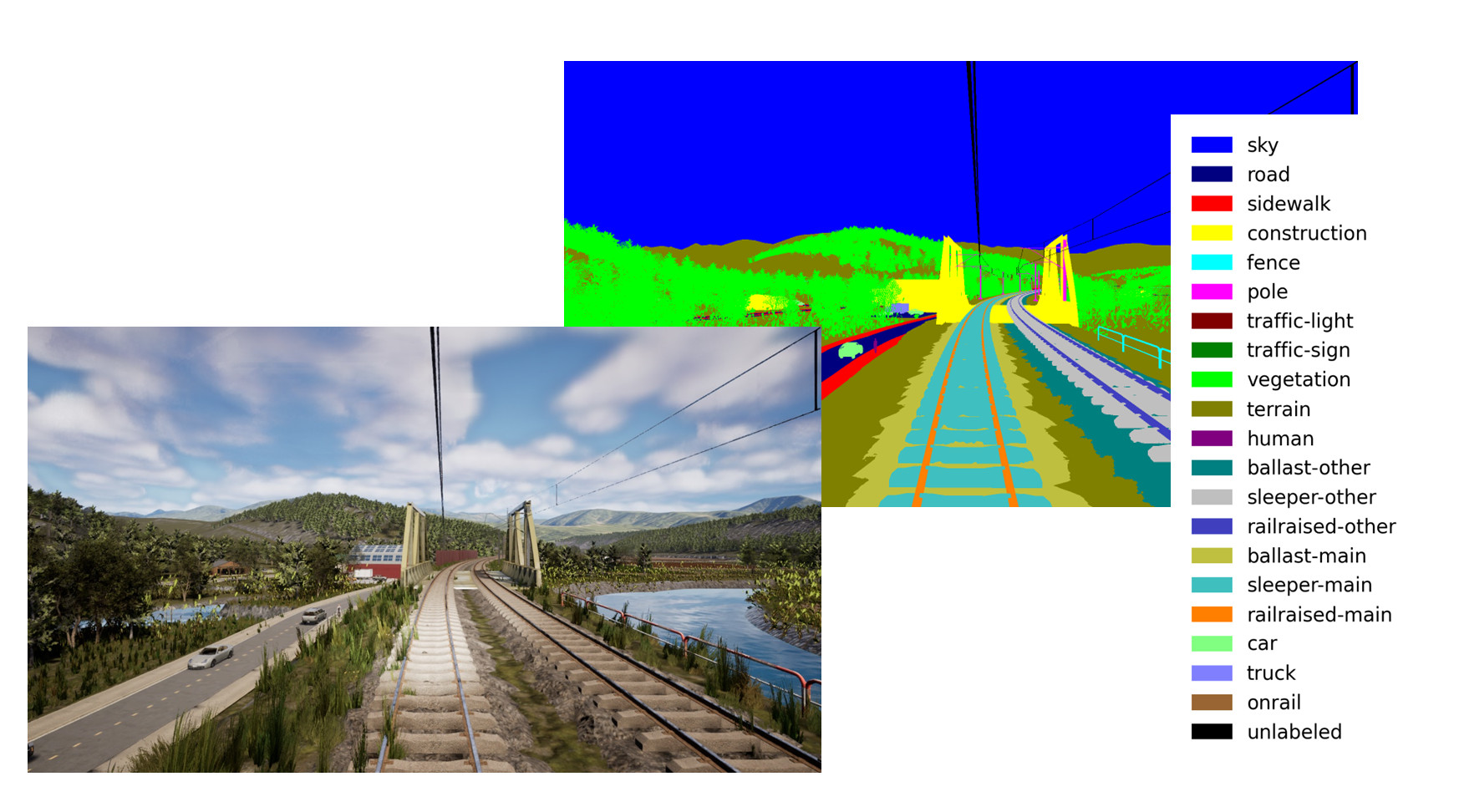
Semantic Segmentation Example
Different adversarial condition and seasonal changes




Sensor Specs - SynDRA
Stereo RGB Cameras
- Resolution: 1920×1080
- FOV: 90°
- Baseline: 0.6 m
- Height from rails: 3.5 m
- Frame Rate: 10 FPS
Annotations
- Semantic Segmentation pixel-level
- Per-frame camera poses
Dataset Structure - SynDRA
The dataset is organized as follows:
SynDRA/
├── Scenario_0/
│ ├── HV/
│ │ ├── Sunny/
│ │ │ ├── Afternoon/
│ │ │ │ ├── RGBCamera_0/
│ │ │ │ │ ├── Bin_folder/
│ │ │ │ │ │ ├── Sce0_sun_aft_000001.bin
│ │ │ │ │ │ ├── Sce0_sun_aft_000002.bin
│ │ │ │ │ │ └── ...
│ │ │ │ │ ├── Poses/
│ │ │ │ │ └── Times/
│ │ │ │ ├── RGBCamera_1/
│ │ │ │ ├── SSCamera_0/
│ │ │ │ └── SSCamera_1/
│ │ │ ├── Evening/
│ │ │ └── Morning/
│ ├── LV/
│ │ ├── Foggy/
│ │ │ ├── Afternoon/
│ │ │ │ ├── RGBCamera_0/
│ │ │ │ │ ├── Bin_folder/
│ │ │ │ │ │ ├── Sce0_fog_000001.bin
│ │ │ │ │ │ ├── Sce0_fog_000002.bin
│ │ │ │ │ │ └── ...
│ │ │ │ │ ├── Poses/
│ │ │ │ │ └── Times/
│ │ │ │ ├── RGBCamera_1/
│ │ │ │ ├── SSCamera_0/
│ │ │ │ └── SSCamera_1/
│ │ ├── Rainy/
│ │ │ ├── Afternoon/
│ │ │ │ ├── RGBCamera_0/
│ │ │ │ │ ├── Bin_folder/
│ │ │ │ │ │ ├── Sce0_rai_000001.bin
│ │ │ │ │ │ ├── Sce0_rai_000002.bin
│ │ │ │ │ │ └── ...
│ │ │ │ │ ├── Poses/
│ │ │ │ │ └── Times/
│ │ │ │ ├── RGBCamera_1/
│ │ │ │ ├── SSCamera_0/
│ │ │ │ └── SSCamera_1/
├── Utils/
│ ├── RGB_bin_to_png.py
│ ├── SS_bin_to_png.py
│ └── Sensor_Specs.txt
└── README.md